近日,通用足式机器人公司逐际动力(LimX Dynamics)完成天使轮和Pre-A轮融资,总金额近2亿元。天使轮投资方包括峰瑞资本、智数资本、明势资本和昆仲资本;Pre-A轮领投方为绿洲资本,联想创投也参与了本轮投资,并将在机器人与AI的结合、关键产业资源等方面大力支持逐际动力的创新和落地。
据了解,本轮融资将为逐际动力从产品落地到前沿技术预研带来资金和产业支持,涵盖四轮足机器人的产品化、人形双足机器人的研发、AI与具身智能核心技术的攻关。
深圳逐际动力科技有限公司成立于2022年1月,核心团队在机器人领域有着十数年的深厚积累,逐际动力拥有全球领先的基于感知的运动控制算法、足式机器人强化学习算法和全自研高性能足式关节,技术发展战略清晰明确:持续发挥软件定义硬件的技术优势,推动足式机器人运动的智能化,为未来的通用AI机器人打造强大可靠的运动控制能力。
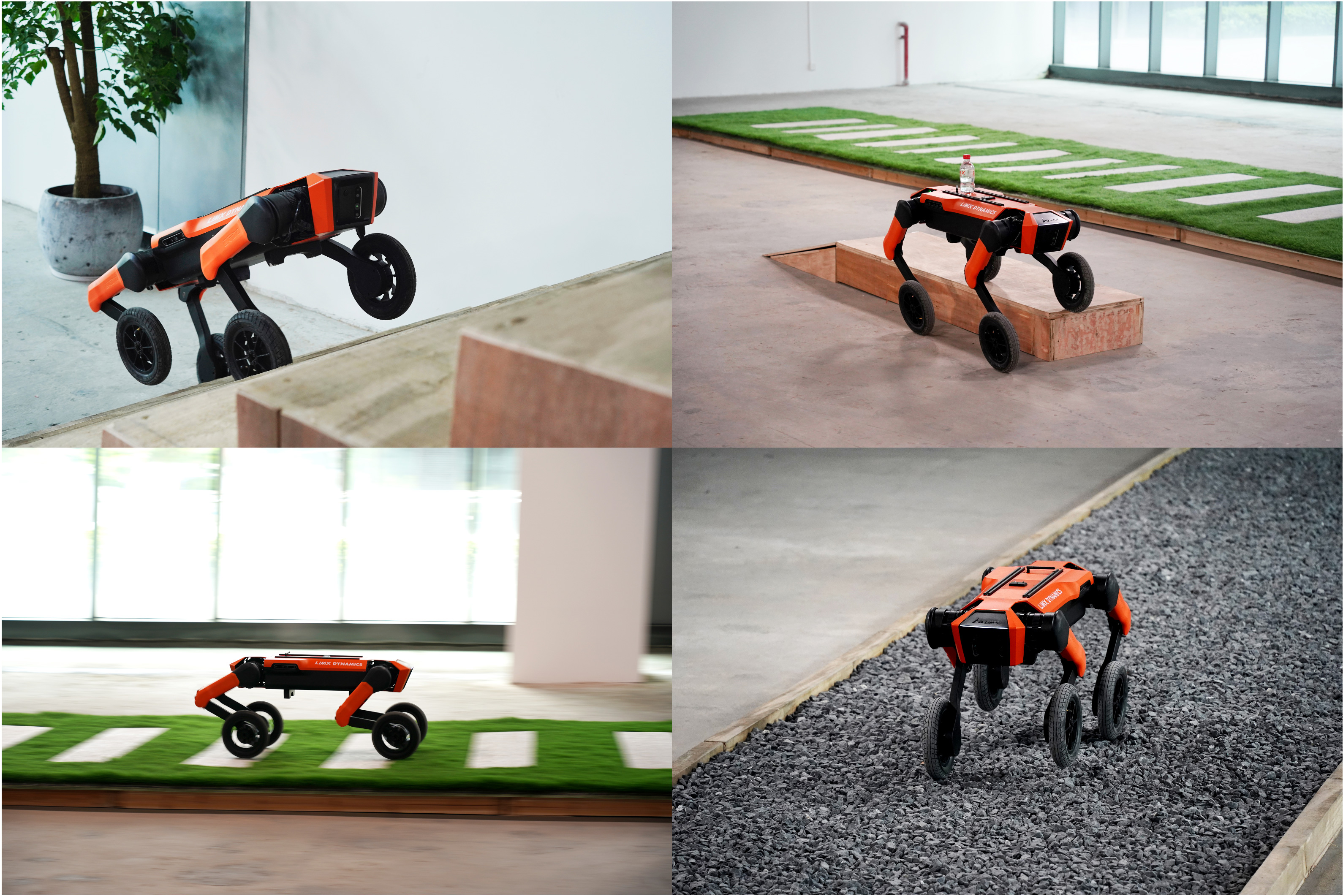
逐际动力首款四轮足产品W1自今年9月发布以来获得了来自海内外学术和产业界的高度关注和认可,下一阶段将与战略客户和合作伙伴联手攻坚落地,围绕实时地形感知、感知与运动控制的融合、高性能关节,持续迭代产品的软硬件能力,突破当下足式机器人商业化落地的技术瓶颈。
逐际动力的人形双足机器人与四足机器人共享底层核心技术,采用Model-based和Learning-based的混合方式,聚焦人形双足机器人在地形感知与复杂地形适应能力的突破。逐际动力将率先打造足式机器人的全地形移动平台,成为“地面的大疆”,实现机器人在全地形上,稳定地从A点到B点的移动功能。

逐际动力创始人张巍博士表示:“感知与运动控制的融合将是下一代足式机器人实现突破的关键技术,也是逐际动力运动智能Motion Intelligence的核心,我们是全球为数不多专注于足式机器人运动智能研发的团队,有国际一流的研究成果、领先的技术攻关能力和顶尖的人才储备。借助技术的领先优势,逐际动力聚焦落实四轮足机器人的产品落地,有序开展人形双足、AI与通用机器人结合的关键技术攻关,‘顶天立地’扎实做好产品,持续保持技术领先。我们选择志同道合的投资人,在通用机器人这个难而伟大的赛道上,帮助团队走得更稳、更远。”
联想集团高级副总裁、联想创投集团总裁贺志强表示,通用机器人在产业升级中具有重要作用,而足式机器人是通用机器人的必然形态,具有较强的生产环境适应力,其最大技术难点在于感知和运动控制的结合。逐际动力在多刚体动力学、实时地形感知、足式机器人强化学习等核心技术领域拥有国际领先的研发成果与丰富的技术积累,联想创投将依托CVC2.0的生态优势持续为逐际动力提供赋能,加速四轮足机器人等不同足式机器人在B端、C端领域的商业落地和前沿研究。