
【猎云网(微信:ilieyun )北京】5月11日报道
)北京】5月11日报道
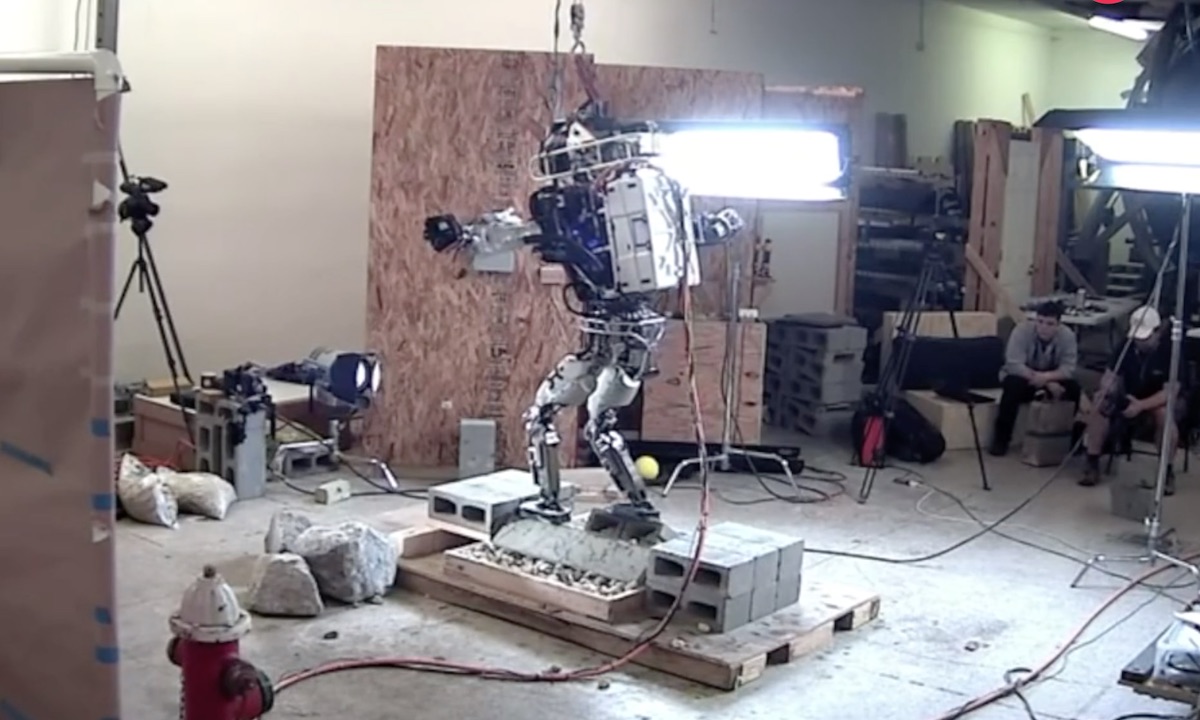
最近,IHMC Robotics公司公布了一段波士顿动力Atlas机器人的视频,视频中,Atlas机器人在小心翼翼地、自主地走过各种物体,包括悬空的木板和摇晃的砖块。
这台Atlas机器人高约1.83 米,重约149~181千克,全身有多达28个液压关节,其原型是PETMAN机器人。

IHMC表示,他们的机器人已经能够通过自主规划在狭窄的地形上行走,并透露,在这种类型的地形上成功率约为50%。同时,计划通过使用角动量增加平衡并更好地考虑关节运动范围来提高成功率。
据悉,这款机器人使用的是LIDAR感知地形,LIDAR是一个使用脉冲激光传感器测量物体之间距离的系统,是许多自动驾驶车辆导航系统的重要组成部分。机器人还使用“路径规划算法”来跟踪其行程开始与目标之间的路线。

人形机器人有着非常独特的走路方式。他们的膝盖弯曲,躯干尽可能保持不动,波士顿动力的Atlas机器人也采用这种蹲伏式的走路方式,因为腿保持弯曲状态可以防止跌倒。
这并非人类的走路方式,IHMC的机器人专家们除了提高类人机器人的效率外,也在试图让机器人像人一样走路,让它们变得更加灵活,能够应对更多崎岖的地形,甚至未来在救援行动中发挥积极的作用。
一直以来,波士顿动力机器人的每一次亮相都备受关注。
去年10月,波士顿动力Atlas机器人就在一段视频中越过了一根木头,然后一路向前,跳上了一组40厘米的台阶。

虽然让一个巨大、笨重的机器人双脚行走已经是少数公司完成的壮举,但这里有一系列新的挑战。让Atlas的下肢在台阶上上下移动,同时适当地将重量和动量转移到一只脚上,而不会导致正面朝下,这需要适应一套复杂的力学。
请注意Atlas中跳跃过程中的横向平衡,我们可以在慢动作中看到,它的臀部/脚似乎有点倾斜以进行补偿。
波士顿动力公司成立于1992年,是从美国国防部的资助计划中走出来的项目,一直以军事野外负重为应用方向,但由于液压系统的噪音太大且无法有效解决,最终没有获得美国军方订单。
2013年,波士顿动力被谷歌收购,16年2月份,他们在YouTube上发布了新版Atlas机器人的视频,一时间把全世界都给震惊到了。
但就在波士顿动力机器人一系列疯狂的表演秀之后,在2016年3月18日传出消息称,谷歌打算卖掉它。具体原因包括,一是认为波士顿动力短期内无法挣钱,团队对它失去了耐心;二是,波士顿动力公司和谷歌其他部门的合作就像一堵墙,理念不一致,内部矛盾重重。
这些酷炫的机器人似乎并没有在商业化和实用性上做出平衡。
从另一方面,这些能空翻、能跑、能过障碍物、能拿东西的仿生多足机器人,代表着今天人类在机器人制造领域机动性、灵活性以及自主感知能力的巅峰。
波士顿动力的一位前员工曾透露,谷歌的想法是开发供办公室或家用的机器人产品。基于这个理念,谷歌希望采用轮式运动的机器人而不是足式机器人,这样对消费者来说更为方便也更为友好,技术上也没有那么复杂。
比如用后空翻出尽风头的双足人型机器人Atlas。作为谷歌时期的代表产品,这款人形机器人在众多细节将机器人技术拉到了新的高度。但是能耗和成本问题依旧没有得到任何解决。目前为止,每台AtLas的造价都在数百万美金之上,并且精巧的零件大多难以量产。
此次学会走独木桥的是波士顿动力旗下的Atlas机器人,此前这个系列的产品迭代大概经历了三个大的版本更新。
Atlas第一版由美国国防高等研究计划署(DARPA)负责监督与波士顿动力公司合作设计和生产,机器人的一只手由Sandia国家实验室开发的,而另一个是由iRobot公司开发。在2013年,DARPA的项目经理吉尔普拉特(Gill Pratt)把Atlas机器人的原型版本和小孩子相比,他说:“一个1岁的孩子几乎不能走路,1岁的孩子摔倒了很多......这就是我们现在处于的状态。”

第一版的主要特点是Atlas需要一根长长的线进行供电,所以在第一版的各项试验中,你都会看到Atlas一直都拖着一根长长的尾巴。但那时候可以在实验室环境中,走过铺满石块的道路,并一直保持身体平衡不摔倒。
其次,Atlas能保持单脚站立,引入外部撞击,在撞击力不是很大的情况下,Atlas仍能保持单脚站立不摔倒。

2015年年年初,为了参加六月初的DARPA机器人挑战赛,Atlas完成了自己的一次进化。也就是Atlas成功进化为第二版。此次变身,Atlas全身的百分之七十五都被重新设计了,只有小腿和脚沿用了上一版的设计,新的设计使得它变得更加强壮、快速、安静,并且得益于其身后的电池大背包,它已经脱离了电缆的束缚。
这版Atlas最显著变化是电源和泵。Atlas第二版的供电系统是板载3.7千瓦时的锂离子电池组,在完成包括行走,站立和使用工具等动作的情况下可以持续一个小时,强大的液压泵可以使得Atlas在摔倒时可以有能力自己爬起来。
经历了前两版,波士顿动力在2016年2月在YouTube上公布了一段视频,这就是我们看到的现在的Atlas第三版,也是在社交网络曝光度最高最知名的机器人,和第二版的动力一样,Atlas采用电源供电和液压驱动。
这版的Atlas高1.75米,重82千克,均比上一版的高1.88米,重156千克在轻便上有所提升。
Atlas身体内部以及腿部的传感器通过采集位姿数据使其保持身体平衡,它头上的激光雷达定位器和立体摄像机可以使Atlas在野外规避障碍物、探测地面状况以及完成巡航任务。在搬箱子、出门推门等过程中需要标记点完成物体识别任务,对物体的识别等机器视觉能力都有大幅提升。